


Grab บริษัทผู้ให้บริการ Food Delivery ชื่อดังจากสิงคโปร์ ประกาศความร่วมมือครั้งสำคัญกับ Natix โปรเจกต์ชั้นนำบนเครือข่ายบล็อกเชน Solana ภายใต้แนวคิด DePIN โดยมีเป้าหมายร่วมกันในการพัฒนาเทคโนโลยีการทำแผนที่และการขับขี่อัตโนมัติแห่งอนาคต
เมื่อวันที่ 6 พฤษภาคมที่ผ่านมา Natix ได้ออกมาเปิดเผยถึงรายละเอียดว่า การผนึกกำลังครั้งนี้ จะนำเอาข้อมูลการทำแผนที่บนบล็อกเชนที่เป็นเอกลักษณ์ของ Natix มาผสานเข้ากับขุมพลังของฮาร์ดแวร์กล้องและเทคโนโลยีการทำแผนที่อันชาญฉลาดของ Grab ที่ขับเคลื่อนด้วยปัญญาประดิษฐ์ (AI)
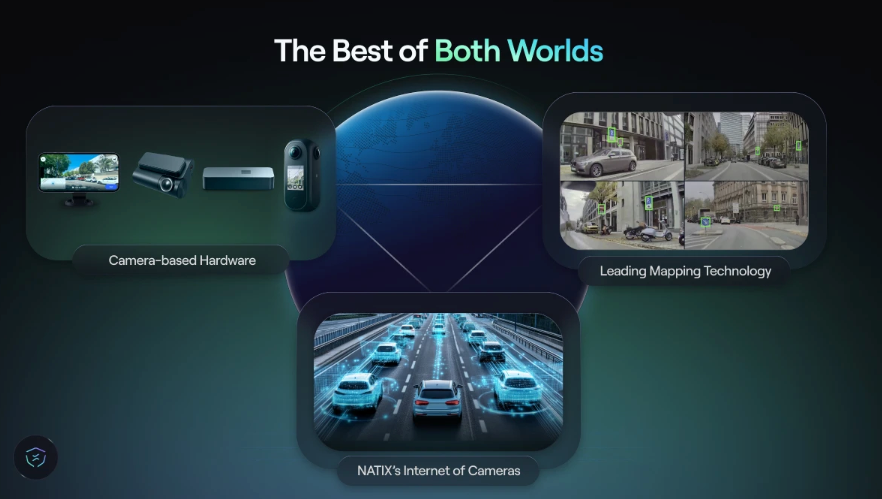
Natix ยังได้เน้นย้ำถึงความสำคัญของความร่วมมือครั้งนี้ โดยกล่าวว่า “นี่คือการรวมเอาจุดแข็งที่ดีที่สุดของทั้งสองฝ่ายมาไว้ด้วยกัน” พร้อมชี้ให้เห็นถึงความเชี่ยวชาญของ Grab ในด้านการทำแผนที่แบบ Crowdsourced ซึ่งเป็นการระดมข้อมูลจากผู้ใช้งานจำนวนมาก และรูปแบบ DePIN ที่โดดเด่นของ Natix ซึ่งเป็นระบบที่สร้างแรงจูงใจให้ผู้ใช้งานร่วมให้ข้อมูลแบบกระจายอำนาจเพื่อรับรางวัล
GrabMaps ระบบแผนที่ดิจิทัลที่เป็นกรรมสิทธิ์ของ Grab เอง ได้ออกมาแสดงความเห็นผ่านโพสต์บน LinkedIn โดยกล่าวว่า “ด้วยการรวมเทคโนโลยีการทำแผนที่ที่ขับเคลื่อนด้วย AI อันทรงพลังของ GrabMaps เข้ากับเครือข่ายข้อมูลแบบกระจายอำนาจของ Natix เรากำลังจะสร้างปรากฏการณ์ใหม่ในการอัปเดตแผนที่แบบเรียลไทม์ที่มีความแม่นยำสูงครอบคลุมทั่วโลก”
ที่น่าจับตามองอีกอย่างคือ ส่วนหนึ่งของความร่วมมือครั้งนี้ Natix เตรียมที่จะเปิดตัวอุปกรณ์สุดล้ำที่มีชื่อว่า “VX360” ซึ่งถูกพัฒนาขึ้นบนแพลตฟอร์มฮาร์ดแวร์ของ Grab โดยอุปกรณ์ชิ้นนี้จะเข้ามาปฏิวัติการเก็บข้อมูลแผนที่ ด้วยการช่วยให้ผู้ขับขี่รถยนต์ไฟฟ้า Tesla สามารถเก็บรวบรวมและแบ่งปันภาพจากรถยนต์ในมุมมอง 360 องศาได้อย่างง่ายดาย
GrabMaps ยังได้ระบุในแถลงการณ์บน LinkedIn อีกว่า “ข้อมูลภาพที่มีคุณภาพสูงเหล่านี้ จะช่วยให้แผนที่ของเรามีการอัพเดทที่สดใหม่ และแม่นยำมากยิ่งขึ้นอย่างที่ไม่เคยมีมาก่อน และยังเป็นชุดข้อมูลสำคัญสำหรับการเทรนและตรวจสอบความถูกต้องของเทคโนโลยีการขับขี่อัตโนมัติ รวมถึงแอปพลิเคชัน AI ทางกายภาพอื่นๆ ในอนาคตด้วย”
นอกเหนือจากการจับมือกับ Natix แล้ว ข้อมูลจากเว็บไซต์อย่างเป็นทางการของ GrabMaps ยังเผยให้เห็นว่า พวกเขายังได้ร่วมมือกับพันธมิตรชั้นนำอื่นๆ อีกมากมายในด้านเทคโนโลยีการทำแผนที่ตำแหน่งที่ตั้งเฉพาะพื้นที่ เช่น Loqate, Bing Maps และ Mappls
สำหรับแนวคิดเบื้องหลังความร่วมมือครั้งสำคัญนี้ Natix ได้อธิบายว่า วิธีการทำแผนที่แบบรวมศูนย์ที่เราคุ้นเคยกันดี เช่น Google Street View และ TomTom นั้นมีข้อจำกัดในหลายด้าน ทั้งในเรื่องของประสิทธิภาพ ค่าใช้จ่ายที่สูง และความครอบคลุม รวมถึงความถี่ในการอัปเดตที่ไม่ทันต่อการเปลี่ยนแปลง ทำให้บริษัทต่างๆ ต้องลงทุนมหาศาลในการปรับปรุงแผนที่ให้ทันสมัยอยู่เสมอ
เพื่อแก้ไขข้อจำกัดเหล่านี้ Natix ได้สร้างเครือข่ายกล้องบนท้องถนนของตัวเองขึ้นมา ซึ่งเป็นระบบที่ช่วยให้โมเดลแบบ Crowdsourced สามารถรวบรวมข้อมูลแบบเรียลไทม์เกี่ยวกับสภาพถนนและการเปลี่ยนแปลงต่างๆ จากอุปกรณ์ของผู้ใช้งานได้ด้วย “ต้นทุนที่ต่ำกว่ามาก” ตามที่ Alireza Ghods ผู้ร่วมก่อตั้งและซีอีโอของ Natix ได้ให้สัมภาษณ์ไว้

Ghods ยังเสริมอีกว่า “แม้แต่ Google เองก็เริ่มนำโมเดลนี้มาใช้บ้างแล้ว โดยขอให้ผู้ใช้งานส่งข้อมูลอัปเดตถนน แต่ข้อมูลเหล่านั้นยังคงเป็นกรรมสิทธิ์ มีค่าใช้จ่ายในการเข้าถึงที่สูง และมีให้บริการเฉพาะในพื้นที่ที่บริษัทจ่ายเงินเท่านั้น” พร้อมทั้งชี้ให้เห็นว่า “ระบบการให้รางวัลบนบล็อกเชนนั้นให้ผลลัพธ์ที่ดีกว่าอย่างเห็นได้ชัด ทั้งในแง่ของความถี่ในการส่งข้อมูล การมีส่วนร่วมของผู้ใช้งาน และความครอบคลุมของข้อมูล”
Natix ยังได้กล่าวในประกาศอีกว่า “เรากำลังเปิดโอกาสให้ผู้ขับขี่ Tesla สามารถเข้าถึงและจัดเก็บฟีดกล้องของรถยนต์ของพวกเขาได้อย่างง่ายดาย พร้อมทั้งรับรางวัลจากการร่วมให้ข้อมูลภาพ 360 องศา ซึ่งข้อมูลเหล่านี้จะถูกนำไปใช้ในการพัฒนาโซลูชันการทำแผนที่ให้ดียิ่งขึ้น และเป็นขุมพลังขับเคลื่อนเทคโนโลยี AI ทางกายภาพในอนาคต”
ความร่วมมือครั้งใหม่กับ Natix ในครั้งนี้ ถือเป็นอีกก้าวสำคัญที่ตอกย้ำถึงความสนใจที่เพิ่มมากขึ้นของ Grab ในโลกของคริปโทเคอร์เรนซีและเทคโนโลยีบล็อกเชน ซึ่งสอดคล้องกับการเคลื่อนไหวก่อนหน้านี้ที่ Grab ได้จับมือกับบริษัทชำระเงิน Triple-A เพื่อเปิดให้ผู้ใช้งานสามารถชำระค่าบริการโดยใช้คริปโทเคอร์เรนซีถึง 5 สกุล รวมถึง Bitcoin, ETH และ USDC
ด้วยศักยภาพของทั้งสองบริษัท การจับมือกันในครั้งนี้จึงถูกจับตามองอย่างใกล้ชิด และอาจเป็นจุดเริ่มต้นของการเปลี่ยนแปลงครั้งสำคัญในอุตสาหกรรมการทำแผนที่และการขับขี่อัตโนมัติก็เป็นได้
ที่มา:cointelegraph
